မိုက်လော့အလှုပ်ရှားမှု ပေါင်းစပ်ခြင်း မှားယွင်းခြင်း ကိုင်တွယ်မှုစက်မှု:
အောက်တွင် လှုပ်ရှားသည့် စက်မှုအတွင်း အိမ်ကျောင်းပစ္စည်းများ၏ ထုတ်လုပ်ခြင်းတွင် အဓိကအားဖြင့် အသုံးပြုသည်။ ဒါမှမဟုတ် ပြားမဲ့ ပုံစံများကို ပေါင်းစပ်ပြီး နိုင်းပြီး ပစ္စည်းအဖြစ် ပြောင်းလဲသည်။ အိန်လိုင်း ဆေးကားသော ကျောက်ဖိုးနှင့် မဟာမိတ် ပစ္စည်း၊ အောက်တွင် မဟာမိတ် ကျောက်ဖိုး၊ PU ဘုတ်၊ အပေါ်တွင် မဟာမိတ် ကျောက်ဖိုး သုံးပိုင်းကို ပေါင်းစပ်ပြီး ပြောင်းလဲစက်သို့ လွှားပေးသည်။ ပြောင်းလဲလုပ်ငန်းနှင့် အတူတူ အလုပ်လုပ်သည့် အটိုမေးရေးအဆင့်မြင့်၊ ထုတ်လုပ်မှုအကောင်အထည်မြင့်၊ ထုတ်လုပ်မှုအကောင်အထည်မြင့်၊ ပိုင်းခြားအရွယ်အစားကို အလိုလျော်စွာ ထိန်းသိမ်းပြီး လွယ်ကူစွာ ပြောင်းလဲနိုင်သည်။
အလိုလျော်စွာ ပေးပို့စက်၏ ဖွဲ့စည်းပုံ:
A အဆင့်: အောက်တွင် မဟာမိတ် ကျောက်ဖိုး ဆေးကားမှုအစိတ်အပိုင်း၊ ပါဝင်သည့် လေ့လာမှုအတွင်း ဖျား၊ ပိုင်းခြားမှုအတွင်း မြောက်ဖျား၊ ဆေးကားမှုအတွင်း မြောက်ဖျား၊ ဆေးကားမှုအတွင်း ဖျားမှုအစိတ်အပိုင်း။
B အဆင့်: အပေါ်တွင် မဟာမိတ် ကျောက်ဖိုး ဆေးကားမှုအစိတ်အပိုင်း၊ ပါဝင်သည့် လေ့လာမှုအတွင်း ဖျား၊ ပိုင်းခြားမှုအတွင်း မြောက်ဖျား၊ ဆေးကားမှုအတွင်း မြောက်ဖျား၊ ဆေးကားမှုအတွင်း ဖျားမှုအစိတ်အပိုင်း။
လွှားပေးမှုအစိတ်အပိုင်း: ပါဝင်သည့် လှိုင်းလွှားမှုကား၊ ပေါင်းစပ်မှုပလိတ်ဖɔမ (ပြားအတွင်းသို့ လွှားပေးနိုင်သည်)။
C စီးရီး: PU ပလေတ် ရွှေ့ပြောင်းလဲမှု၊ အိမ်သားချိုးမှ PU ပလေတ်ကို အဆောက်အအုံသို့ ရွှေ့ပါသည်။
အဓိက ပါရမီတာ
1. A-B ကျောက်ဖျား ထုတ်ယူမှု ဂရပ်နှင့် ဘားလောင်း အားပေးမှုကို ဆာဗိုမိုတာနှင့် ဆင်ချိန်း ဘား မှုန်းကိုင်မှုဖြင့် အသုံးပြုသည်။ စီးရီးရွှေ့ပြောင်းမှုနှင့် အဆောက်အအုံဇယားမှုကို မိုတာ ပိုင်းကြေး ဆင်ချိန်း ဘား မှုန်းကိုင်မှုဖြင့် အသုံးပြုသည်။
2. PU ဘုတ်ကား၏ တင်ပြီး ဒေသရွှေ့ပြောင်းမှုကို ပိုင်းကြေးမိုတာဖြင့် ကိုင်တွယ်သည်။ လှည့်ပတ်မှုကို ဆာဗိုမိုတာဖြင့် ကိုင်တွယ်သည်။
3. ထုတ်ကုန်အရွယ်အစားအကျဉ်းချုပ်: အများဆုံး ထုတ်ကုန်အရွယ်အစား 2500*1500mm၊ အနည်းဆုံး ထုတ်ကုန်အရွယ်အစား 1200*860mm။
4. အမြှေးပြား၏ အရွယ်အစားကို 850mm အရွယ်အစားအရောင်းအဝယ်အတိုင်း အစီရင်ခံပြီး၊ ကျောက်ဖျားပြား၏ အရွယ်အစားကို 500mm အရွယ်အစားအရောင်းအဝယ်အတိုင်း အစီရင်ခံသည်။ A နေရာရွှေ့ပြောင်းမှုအစီအစဉ်: အမြှေးပြား - ကျောက်ဖျား - ကျောက်ဖျား - အမြှေးပြား; B နေရာရွှေ့ပြောင်းမှုအစီအစဉ်: ကျောက်ဖျား - ကျောက်ဖျား - အမြှေးပြား - အမြှေးပြား။
၅. သုံးခုစီရင်ဆက်မှုအချိန်တွင် ပေါင်းစည်းထားသော နေရာ၏ chydeviation ၁၀mm ထက်ပိုမျှသာဖြစ်သည်.
၆. လုပ်ငန်းရှိ အများဆုံး အလျင်မြင်သော အချိန်: ≤34s.
ပညာရေးအားဖြင့် လိုအပ်ချက်
Non-woven glass fiber cutting mechanism:
၁. ၄ ခုခုံ unwinding stations ကို ဆောင်ရွက်ထားပြီး၊ unwinding မှာ အင်တာဗျူးမှုမရှိသော unwinding mechanism ကို အသုံးပြုသည်။ လေထိုးမှုဝါလုံးနှင့် magnetic powder clutch တို့ဖြင့် ပြည့်စုံသည်။ လေထိုးမှုဝါလုံးမှာ ပိုမိုမှုနှင့် မှန်ကန်သော ပြောင်းလဲမှုကို မြင်ကြားစွာ ပြုလုပ်နိုင်ပြီး၊ magnetic powder clutch မှာ pulling လုပ်ငန်းအတွင်းမှာ လှိုင်းဒရัมကို ရှေ့သို့ ပြေးဆွဲခြင်းကို အင်နာရှိရာ အားဖြင့် ရပ်တန့်မှုများကို ရှောင်ရှားမှုများကို ရှာဖွေနိုင်သည်။ ပိုင်းခြား unwinding station တိုင်းတွင် ၅၀mm ပြင်ဆင်ရေးအပြင်အဆင်ရှိသည်။ ပေါင်းစည်းထားသော အရွယ်အစားကို လျှော့ချနိုင်သည့် အပြင်အဆင်ကို အတွင်းသို့ ထားရှိနိုင်သည်။ Unwinding height မှာ မြေပြင်မှ ၇၂၀mm အကွာအဝေးရှိသည်။
၂. အလျောက်အရှည်ထားသော ပိုင်းခြားမှုအပိုင်းကို A-B အခန်း ပိုင်းခြားမှုအတွင်းတွင် ထည့်သွင်းပြီး၊ ပိုင်းခြားမှုလမ်းကြောင်းကို ဘက်ဖက်တွင် ထည့်သွင်းထားသည်။ အလျှပ်စစ်ပရောဖိုင်လ်နှင့် အတိုက်အတာလုံးဝင်သော ဘယ်လ်လှုပ်ရှားမှုစနစ်ကို အသုံးပြုသည်။ ပိုင်းခြားမှုအရှည်က ၀ မီလီမီတာ-၂၅၀၀ မီလီမီတာအထိ ပြင်ဆင်နိုင်ပြီး၊ ဆွဲခြင်းအမြန်က ၁၀ မီလီ/စက်-၁၀၀၀ မီလီ/စက်အထိ ပြင်ဆင်နိုင်သည်။ တန်ဖိုးများကို လုပ်ဆောင်ခြင်းအခြေခံပြင်ပြီး ပိုင်းခြားမှုကို ဆွဲခြင်းပြီးပြီး လုပ်ဆောင်သည်။
3. ဖြတ်ခြင်းအပိုင်းသည် နိုင်ထားသောအမျိုးအစားရubber rollerနှင့် automatic cutting knifeတွင် ဖွဲ့စည်းထားသည်။ Glass fiberနှင့် non-woven fabricများသည် နိုင်ထားသောအမျိုးအစား rubber rollerမှ အမြဲတမ်းနိုင်ထားသည်၊ အင်အားဖြင့် ရှို့လျှင်ရှို့သွားနိုင်ပြီး ရှို့လျှင်အမြန်က pullခြင်းအမြန်နှင့် အတူညီသည်။ နေရာသတ်မှတ်ပြီးသော် automatic cutting knifeက ဖြတ်ခြင်းကို ပြီးစီးသည်။ ဖြတ်ပြီးနောက် PU sheetနှင့်အတူ stackခြင်းကို ပြီးစီးရန် ရှို့လျှင်ဆောင်ရွက်နေသည်။ နေရာသတ်မှတ်မှုအတိုင်းအတာသည် ±5mm ဖြစ်သည်။
4. ဖြတ်ခြင်း mechanism အသစ် ၂ ကော်စ်ရှိသည်။
၅. ပစ္စည်းမရှိသောအချိန်ကိုတွေ့ရှိရန်ဖြစ်စေရန်အဆင့်ထိန်းသို့၊ ပစ္စည်းမရှိသောအခါတွင်လုပ်ငန်းစဉ်ကိုအာရှခြင်းပြုပြီး၊ ဂလျာဆိုင်းကိုယူဆောင်ရန်မဟုတ်ပါ။ ပစ္စည်းပြောင်းပြီးနောက် ရေးထားသောအဆင့်ကိုပြန်လည်ထိန်းချိုးပါ။ ထို့နောက် ဂလျာဆိုင်းကိုယူဆောင်ရန်လုပ်ငန်းစဉ်ကိုလောလောလုပ်ဆောင်ပါမည်။
၆. လုပ်ငန်းစဉ်အမျိုးအစား: PU ပလိট်ကို A စီးရီးထံသို့ရွှေ့ပြီး အမှောင်ပစ္စည်းနှင့် ဂလျာဆိုင်းကို ဖြတ်ခြင်းအားလုံးကို B စီးရီးတွင်ရွှေ့ပြီး ဖြတ်ခြင်းမပြုဘဲ ထားရှိပါသည်။ A စီးရီးတွင် PU ပလိတ်ကိုအဆင့်အတန်းတွင်ထားပြီး၊ B စီးရီးတွင်ဖြတ်ခြင်းအဆင့်ကို ပြောင်းရောက်သော ယာဉ်ပြောင်းလဲပြီးနောက် လုပ်ဆောင်မည်ဖြစ်ပါသည်။ ယာဉ်ပြောင်းသောအဆင့်က A စီးရီးမှထွက်ပြီးနောက်၊ A စီးရီးတွင် အမှောင်ပစ္စည်းနှင့် ဂလျာဆိုင်းကို ထွက်ပြီး ထားရှိပြီးနောက် စောင့်ရှောက်ပါမည်။
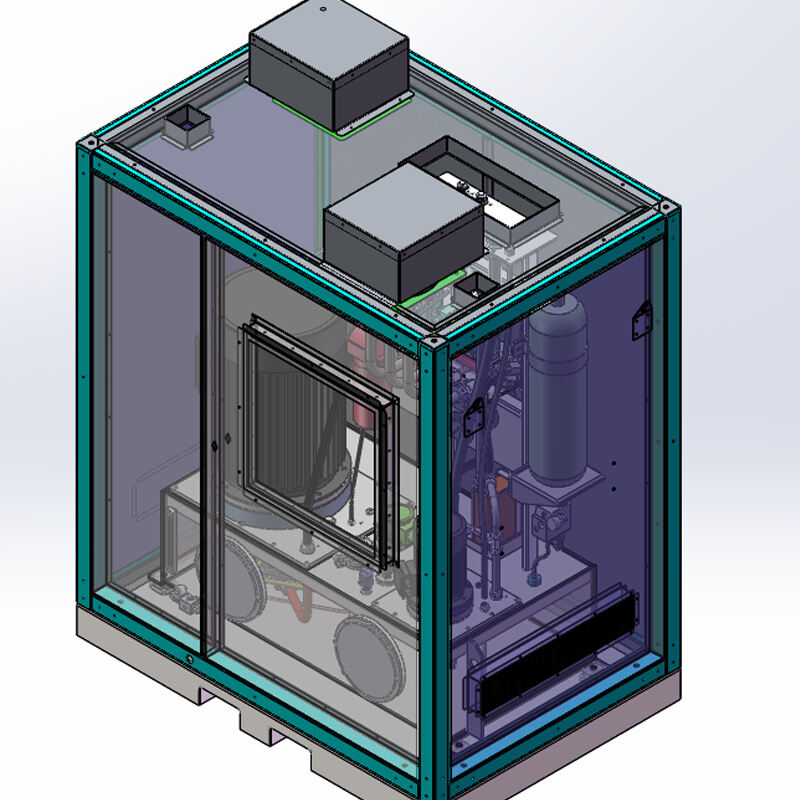
အဓိကလုပ်ဆောင်ချက်မှာ အတွင်းရှိအသုံးပြုသောအသံထွက်လုပ်ငန်းနှင့်ကိရိယာများ(ဥပမာ- ဟိုင်ဒရှိုလိတ်စီး)ကို အဝေးသို့ အသံထွက်ကိုလျော့ချရန်အတွက် ပိတ်ဆို့ထားသည်။